
تُعتبر السيارات ذاتية القيادة موضوعًا مُثيرًا للجدل والإعجاب، إذ تعتمد على أنظمة مساعدة السائق المُتقدمة (ADAS) لتحقيق مستوى عالٍ من الأمان والراحة. ورغم عدم وجود سيارات ذاتية القيادة بالكامل حتى الآن، فإنَّ التقنيات الحالية تُتيح وظائف مثل التوجيه التلقائي والركن الذاتي.
تستخدم هذه السيارات أنظمة الرؤية الحاسوبية المُتطورة لتحليل المحيط واتخاذ قرارات ذكية، مُعتمدةً على مجموعة متنوعة من أجهزة الاستشعار. في هذه المقالة، سنتناول أساسيات الرؤية الحاسوبية وكيف تُعزز من فعالية القيادة الآلية، بالإضافة إلى التحديات والابتكارات المستقبلية المتوقعة في هذا المجال.

ما هي الرؤية الحاسوبية؟
الرؤية الحاسوبية هي تقنية تسمح للآلات برؤية الأشياء والتعرف عليها في البيئة المُحيطة بها. إنها مجموعة فرعية من الرؤية التي تُركز على التطبيقات الصناعية للكشف عن الأشياء الموجهة نحو الرؤية في الآلات المستقلة مثل الروبوتات والمركبات.
تستخدم الرؤية الحاسوبية اليوم خوارزميات التعلم العميق للذكاء الاصطناعي مثل الشبكات العصبية التلافيفية (CNNs) لإنشاء نماذج قوية ومُعممة بشكل جيد يُمكنها تحديد الكائنات بدقة في ظروف مختلفة. إنها تجعل من المُمكن تنفيذ الرؤية الآلية في مختلف المهام التي تتطلب موثوقية أعلى في التصنيع والزراعة والروبوتات والسيارات.
كيف تعمل الرؤية الحاسوبية في السيارات ذاتية القيادة؟
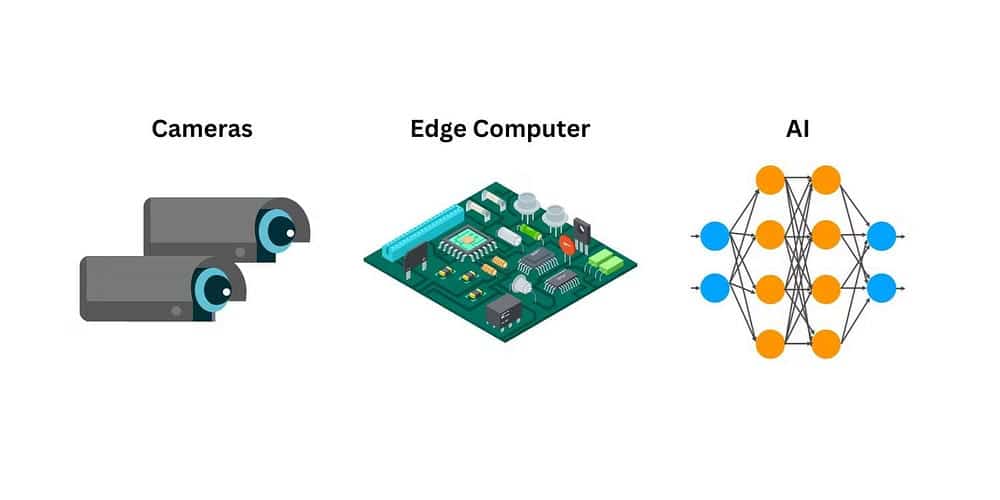
يُمكن عادةً تقسيم الرؤية الحاسوبية في السيارات ذاتية القيادة إلى ثلاثة أجزاء: نظام الكاميرا، والمعالجة (حوسبة الحافة)، والذكاء الاصطناعي. تسمح مجموعة التكنولوجيا هذه للسيارات المُستقلة برؤية الإشارات المُختلفة والعقبات والتفكير فيها وتحديدها أثناء القيادة. دعونا نناقش كل جزء بعمق لفهم كيفية ربط هذه التقنيات معًا لتكوين رؤية آلية للسيارة ذاتية القيادة.
نظام الكاميرا
تعتمد الرؤية الحاسوبية على أنظمة الكاميرا لجمع المعلومات المرئية عن البيئة. تستخدم السيارات ذاتية القيادة العديد من الكاميرات المُثبتة حول السيارة لجمع أكبر قدر مُمكن من المعلومات المرئية.
يتم استخدام مُستشعرين رئيسيين في كاميرات الرؤية الآلية: أشباه الموصّلات ذات الأكاسيد المعدنية المُتتامة (CMOS) والأجهزة المُقترنة بالشحن (CCD). بالنسبة للسيارات ذاتية القيادة، غالبًا ما يُفضل استخدام تقنية CMOS بسبب سرعة قراءتها السريعة، والإلكترونيات القوية الموجودة ضمنها، وقدرات المُعالجة المتوازية، مما يجعلها المُستشعر الأسرع. قد تُساعد الحلول، مثل أوضاع الإضاءة المُختلفة والرؤية الليلية الرقمية والمرشحات، مستشعر CMOS أثناء ظروف الإضاءة غير المثالية.
وبالنسبة للسيارات ذاتية القيادة، يتم تركيب كاميرات على مسافات معينة من بعضها البعض لإنتاج رؤية مُجسمة. الرؤية المجسمة هي القدرة على الجمع بين اثنين أو أكثر من المدخلات البصرية، مما يخلق إحساسًا بالعمق أو الأبعاد الثلاثية في الأشياء والبيئة. وهذا بدوره يسمح للسيارات بتثليث وحساب المسافة التقريبية بين الجسم والسيارة.
وبما أن البشر لديهم عينان، فإننا نستفيد أيضًا من الرؤية المُجسمة. يُمكنك اختبار هذه الرؤية بنفسك؛ أغمض عينًا واحدة واختر شيئًا صغيرًا من مكتبك. ضع يدك على جانب الجسم وتأكد من أنَّ طرف الجسم على بعد بوصتين على الأقل. حاول التوقف لبضع ثوان ولاحظ مدى ثقتك في التقريب الخاص بك. الآن، حاول فتح كلتا عينيك وانظر كيف أصبح إحساسك بالعمق أفضل بكثير.
حوسبة الحافة
حوسبة الحافة هي عملية تقريب معلومات التخزين والقدرات الحاسوبية للجهاز الذي يُنتج تلك البيانات وللمُستخدمين الذين يتعاملون معها. تقليديًّا، كانت التطبيقات تنقل البيانات من الأجهزة الذكية، مثل أجهزة الاستشعار والهواتف الذكية إلى مركز بيانات مركزي لمعالجتها. ومع ذلك، تجاوز التعقيد غير المسبوق وحجم البيانات قدرات الشبكة. تعمل أنظمة حوسبة الحافة على نقل قدرات المعالجة لتُصبح قريبةً من المستخدمين والأجهزة، ما يساهم في تحسين أداء التطبيقات بشكل كبير وتقليل متطلبات عرض نطاق الشبكة وتوفير إحصاءات بسرعة أكبر في الوقت الفعلي.
بينما يقوم نظام الكاميرا الموجود في السيارة ذاتية القيادة بجمع البيانات، سيقوم الكمبيوتر الموجود على السيارة (مُعالج الحافة) بمعالجة جميع المدخلات في الوقت الفعلي لتحديث النظام بشأن حالة البيئة على الفور. على الرغم من أنَّ مهام الرؤية الحاسوبية النموذجية يمكن أن توفر المال باستخدام الحوسبة السحابية، إلا أن هناك ببساطة مخاطر كبيرة جدًا بالنسبة للسيارات ذاتية القيادة لربطها بالسحابة، حتى لو كان ذلك بسبب الاستعانة بمصادر خارجية للعملية في متطلبات الرؤية الآلية.
يؤدي استخدام كمبيوتر مُتطور لمعالجة بيانات الإدخال إلى التخلص من مشكلات زمن الوصول ويضمن استلام البيانات ومعالجتها ونقلها في الوقت الفعلي. تستخدم أجهزة الكمبيوتر المُتطورة للسيارات ذاتية القيادة أجهزة كمبيوتر مُتخصصة تدمج معالجات رسومات الذكاء الاصطناعي مثل Tensor Core و CUDA Cores من NVIDIA.
خوارزميات الذكاء الاصطناعي
لقد كانت الخوارزميات دائمًا جزءًا مهمًا من الرؤية الآلية. الخوارزمية هي التي تسمح للكمبيوتر بالتعرف على جميع الأنماط والأشكال والألوان التي يُوفرها نظام الكاميرا. إنَّ استخدام الذكاء الاصطناعي بدلاً من خوارزميات الرؤية الحاسوبية التقليدية يعزز بشكل كبير قدرة السيارة ذاتية القيادة على تحديد الأشياء وإشارات الشوارع وعلامات الطريق وإشارات المرور بشكل موثوق. يتم استخدام العديد من خوارزميات الذكاء الاصطناعي لتدريب السيارات ذاتية القيادة. الأكثر شعبية تشمل:
- YOLO (أنت تنظر مرة واحدة فقط): خوارزمية للكشف عن الأشياء في الوقت الفعلي تُحدد وتتتبع الأشياء في مجال رؤية السيارة.
- SIFT (تحويل ميزة Scale-Icar’sant): تُستخدم لاستخراج الميزات، فهي تُساعد السيارة على التعرف على المعالم والأشياء المميزة في مُحيطها.
- الرسم البياني للتدرجات الموجهة (HOG): تُستخدم للتعرف على الكائنات، وتُركز على استخراج الأنماط والتدرجات المحلية من الصور.
- TextonBoost: خوارزمية تُساعد في التعرف على الكائنات من خلال تحليل الأنسجة الموجودة في البيئة.
- AdaBoost: تُستخدم لتصنيف البيانات، وتجمع AdaBoost بين عدة مصنفات ضعيفة لاتخاذ قرارات قوية بشأن الأشياء والعقبات في مسار السيارة.
أهمية الرؤية الحاسوبية في السيارات ذاتية القيادة
الرؤية الحاسوبية هي الطريقة الأساسية للسيارة ذاتية القيادة لاستشعار وفهم مُحيطها. بدون الرؤية الآلية، من المُحتمل جدًا أن يتم إرجاع السيارات ذاتية القيادة إلى المستوى الأول على مقياس استقلالية السيارة وقد لا تصل أبدًا إلى الاستقلالية الكاملة.
بفضل الرؤية الآلية، أصبحت السيارات ذاتية القيادة الآن قادرة على تصنيف الأشياء، واكتشاف الممرات والإشارات، وتحديد اللافتات، والتعرف على حركة المرور.
على الرغم من أنَّ العديد من السيارات ذاتية القيادة تستخدم الآن أجهزة استشعار مُختلفة، مثل LIDAR، و RADAR، و SONAR، إلا أن جميعها تعتمد بشكل كبير على الرؤية الحاسوبية لرؤية البيئة، وتحديد الأشياء، وفهم معنى الإشارات وإشارات المرور على الطريق. كل هذه المُستشعرات الإضافية موجودة فقط لتعزيز رؤية الآلة وتعزيز سلامة الأشخاص والحيوانات والممتلكات.
ومع ذلك، يُمكن للرؤية الآلية أن تعمل بشكل مستقل دون مساعدة أجهزة الاستشعار الأخرى لتوفير قدرات التحكم الآلي. في الواقع، تخلت أحدث سيارات Tesla ذاتية القيادة عن نظام الرادار، وتعتمد الآن فقط على الرؤية الآلية لنظام الطيار الآلي الخاص بها.
وعلى الرغم من أنَّ هذا لا يعني أي شيء من حيث التشكيك في فائدة تقنيات الاستشعار الأخرى، إلا أنه يظهر أهمية وقوة الرؤية الحاسوبية في السيارات ذاتية القيادة.
الأسئلة الشائعة
س1. ما هي تقنية الرؤية الحاسوبية في السيارات ذاتية القيادة؟
تقنية الرؤية الحاسوبية هي نظام يعتمد على الأجهزة والبرمجيات للتحليل والاستفادة من الصور ومقاطع الفيديو لتمكين السيارات ذاتية القيادة من التعرف على البيئة المُحيطة بها واتخاذ القرارات اللازمة أثناء القيادة.
س2. كيف تعمل تقنية الرؤية الحاسوبية في السيارات؟
يتم تجهيز السيارة بكاميرات وأجهزة استشعار مُتعددة تلتقط الصور والفيديو من مُحيطها. يتم معالجة هذه البيانات باستخدام البرمجيات المُتقدمة لتحليل الصور والتعرف على الأشياء والمعالم المختلفة في الطريق.
س3. ما هي أهمية تقنية الرؤية الحاسوبية في القيادة الذاتية؟
تقنية الرؤية الحاسوبية أساسية للقيادة الذاتية، حيث تسمح بالتعرف على الإشارات المرورية والمركبات الأخرى والعوائق على الطريق. تُمثل هذه المعلومات الحية أساس اتخاذ القرارات الآلية بما في ذلك توجيه السيارة وتجنب الحوادث.
س4. ما هي التحديات التي تُواجه تقنية الرؤية الآلية؟
تشمل التحديات التي تواجه تقنية الرؤية الحاسوبية عوامل مثل الظروف الجوية السيئة مثل الضباب والأمطار، وصعوبة التعرف على الأشياء في الظلام التام، وحماية البيانات والخصوصية.
س5. ما هي التطورات المُستقبلية المتوقعة في هذا المجال؟
من المُتوقع أن تتطور تقنية الرؤية الحاسوبية باستمرار، مع تطبيقات أفضل للذكاء الاصطناعي وتحسين قدرات الاستشعار والتعرف على الصور. من الممكن أيضًا توسيع استخدام هذه التقنية إلى مجالات أخرى خارج السيارات.
مستقبل رؤية الآلة في السيارات ذاتية القيادة
الرؤية الحاسوبية هي أساس السيارات ذاتية القيادة. ومن خلال الرؤية الآلية، تستطيع السيارات رؤية البيئة وإدراكها تمامًا كما يفعل البشر. ورغم استمرار التحديات، لا يُمكن التقليل من فوائد الرؤية الحاسوبية من حيث السلامة والملاحة. أما بالنسبة لمُستقبل المركبات ذاتية القيادة، فإن أي تقدم إضافي في الذكاء الاصطناعي و/أو حوسبة الحافة و/أو تكنولوجيا الكاميرا سيجعل السيارات ذاتية القيادة أكثر كفاءة، وهو ما من المرجح أن ينقلها إلى مستوى أعلى من الأتمتة.
التعليقات مغلقة.